Kunstmatige intelligentie verslaat voor het eerst wereldkampioenen in FPV drone besturing

Swift is een algoritme met kunstmatige intelligentie dat de kampioenen in FPV drone besturing zou kunnen verslaan. Het is ontwikkeld door ingenieurs van de Universiteit van Zürich.
Dit is wat we weten
Het algoritme is ontworpen om drones te besturen. In 15 van de 25 races was de kunstmatige intelligentie in staat om de wereldkampioenen in FPV drone racen te verslaan en de beste rondetijd neer te zetten.
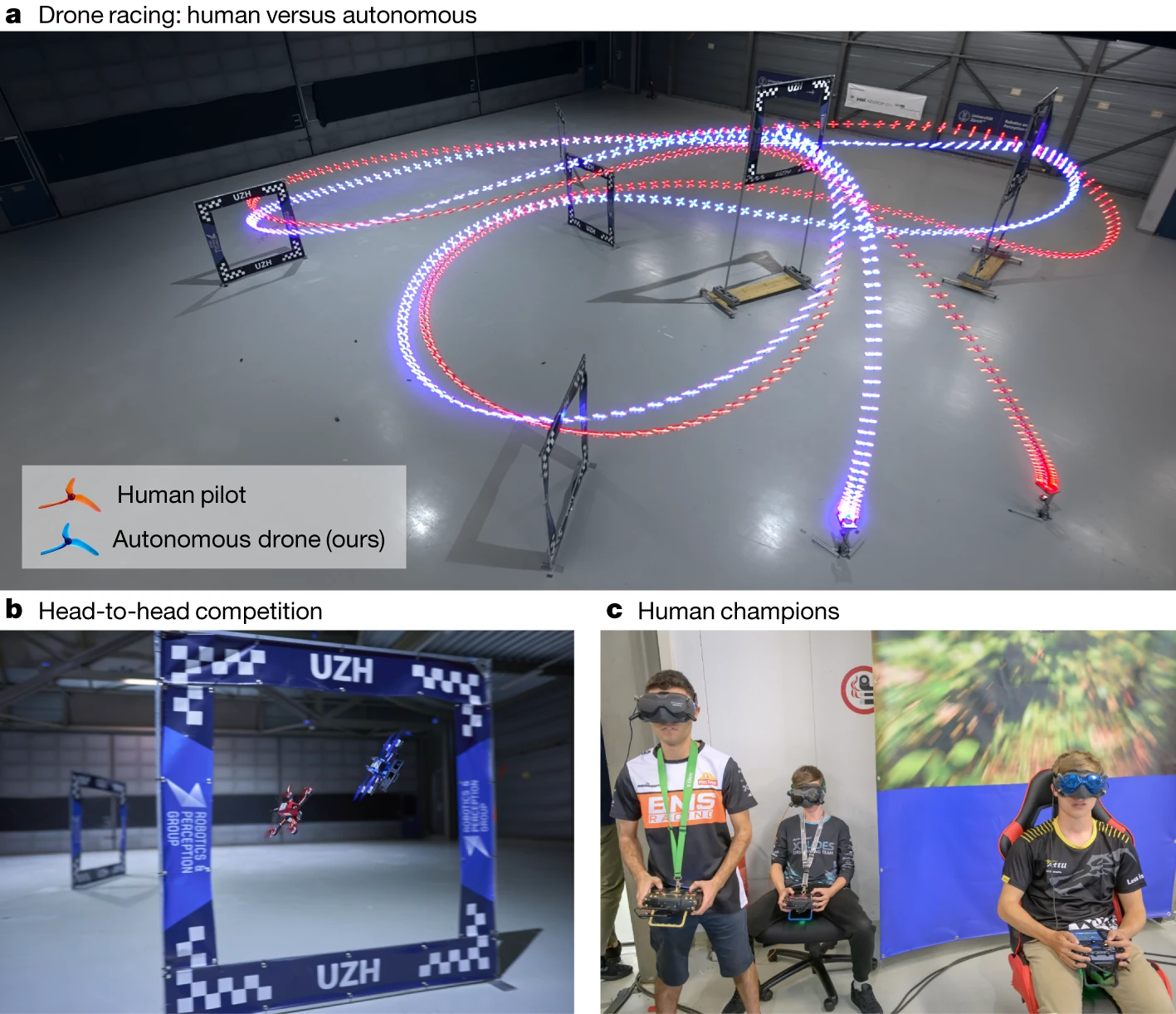
Swift nam het op tegen drie kampioenen in deze discipline, Alex Vanover, Thomas Bitmatta en Marvin Schäpper. Het algoritme werd getraind in een simulatie waarin een racecircuit werd nagebouwd.
Er werd een methode op basis van trial and error gebruikt om de kunstmatige intelligentie te trainen. Dit wordt deep reinforcement learning genoemd. Tijdens de race verwerkte het neurale netwerk gegevens van de camera om de poort te detecteren waar de UAV doorheen moest vliegen.
Tegelijkertijd verzamelde een tweede neuraal netwerk informatie van een traagheidssensor over de snelheid en oriëntatie van de UAV in de ruimte. Op basis van deze gegevens gaf de kunstmatige intelligentie opdrachten aan de FPV UAV.
Zoals we hierboven opmerkten, won Swift AI 15 van de 25 overwinningen, d.w.z. levende mensen bleken in 40% van de races sterker dan het algoritme. Tegelijkertijd was de kunstmatige intelligentie altijd sneller bij de start en nam de steilere bochten.
Ingenieurs van de Universiteit van Zürich geloven dat hun algoritme in de praktijk kan worden toegepast. Bijvoorbeeld bij de inspectie van gebouwen en schepen en bij zoek- en reddingsoperaties. Daarnaast zou de technologie ook interessant moeten zijn voor het leger.
Bron: Ars Technica