Japan's 250-gram moon rover just made the case for swarm robotics

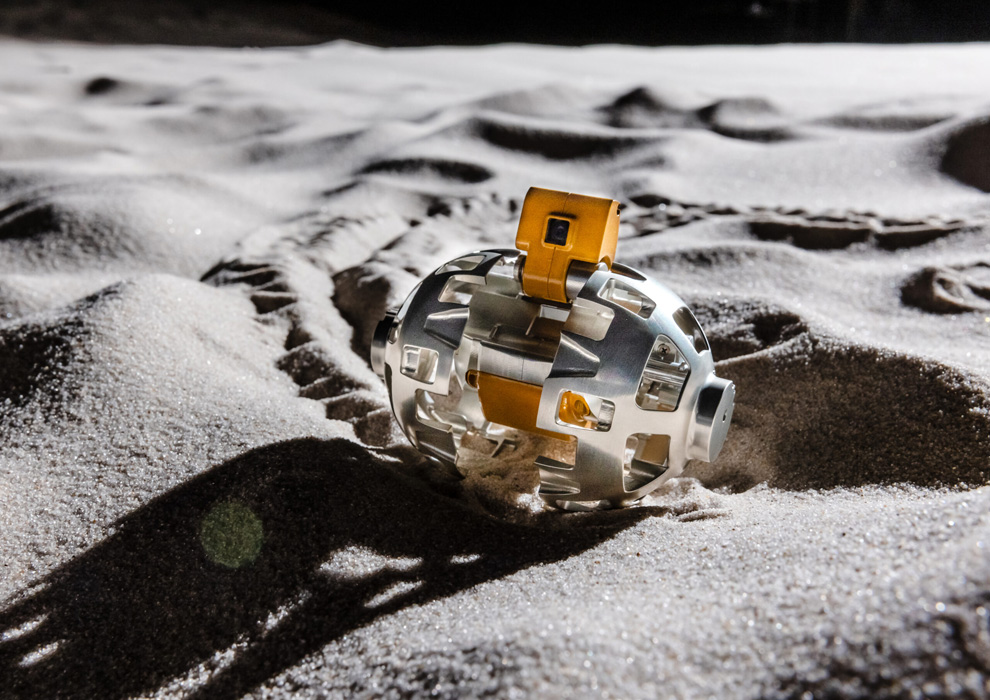
Japan's SORA-Q became the world's first rover to conduct fully autonomous lunar surface exploration when it landed on January 19, 2024, near Shioli crater. The robot weighs just 250 grams and measures 80mm across — roughly the size of an orange. Its success challenges the assumption that meaningful space science requires massive, expensive hardware.
The toy that became a rover
SORA-Q (also called LEV-2) was built by JAXA alongside Sony and toymaker Takara-TOMY — the same company that co-owns the Transformers brand with Hasbro. That connection is more than a fun fact: Takara-TOMY's expertise in compact, transforming mechanisms directly shaped the rover's design. On the lunar surface, the sphere splits open and its two halves become wheels. A camera and stabilisation system sit at the centre.
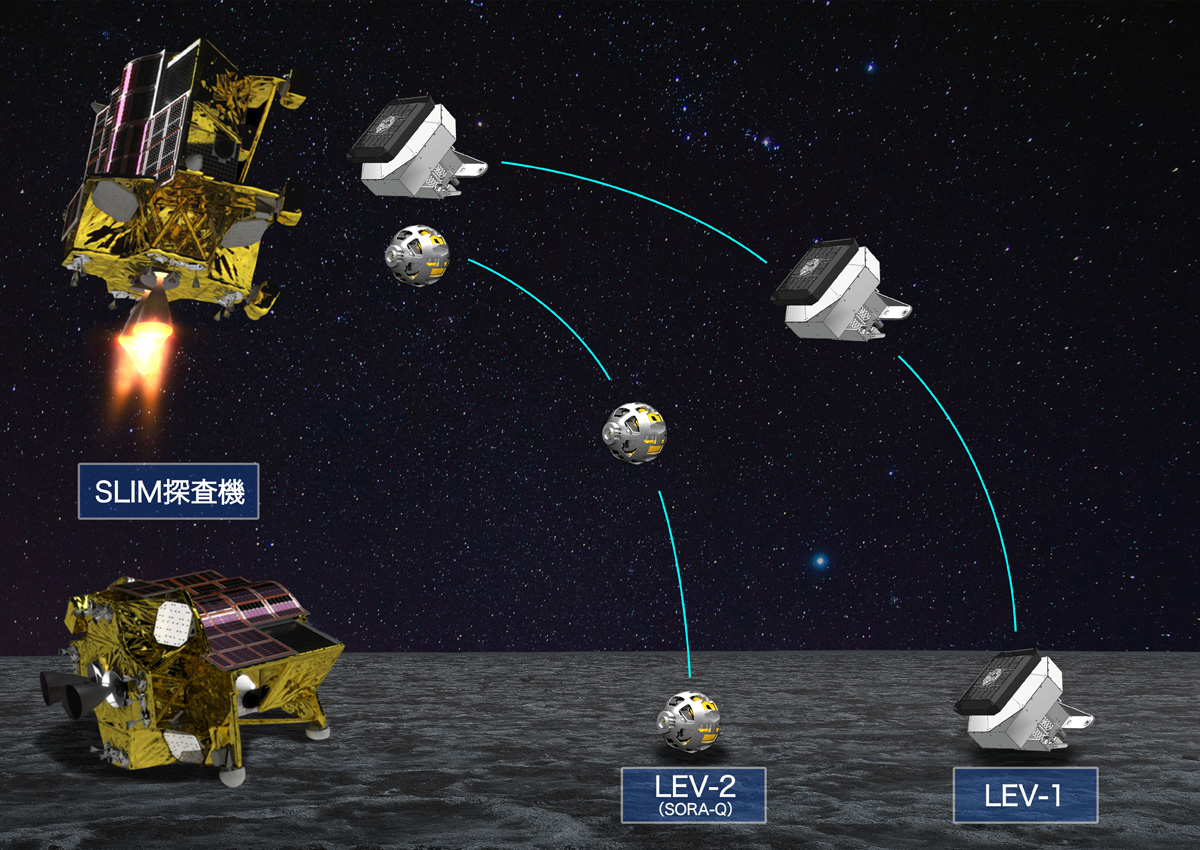
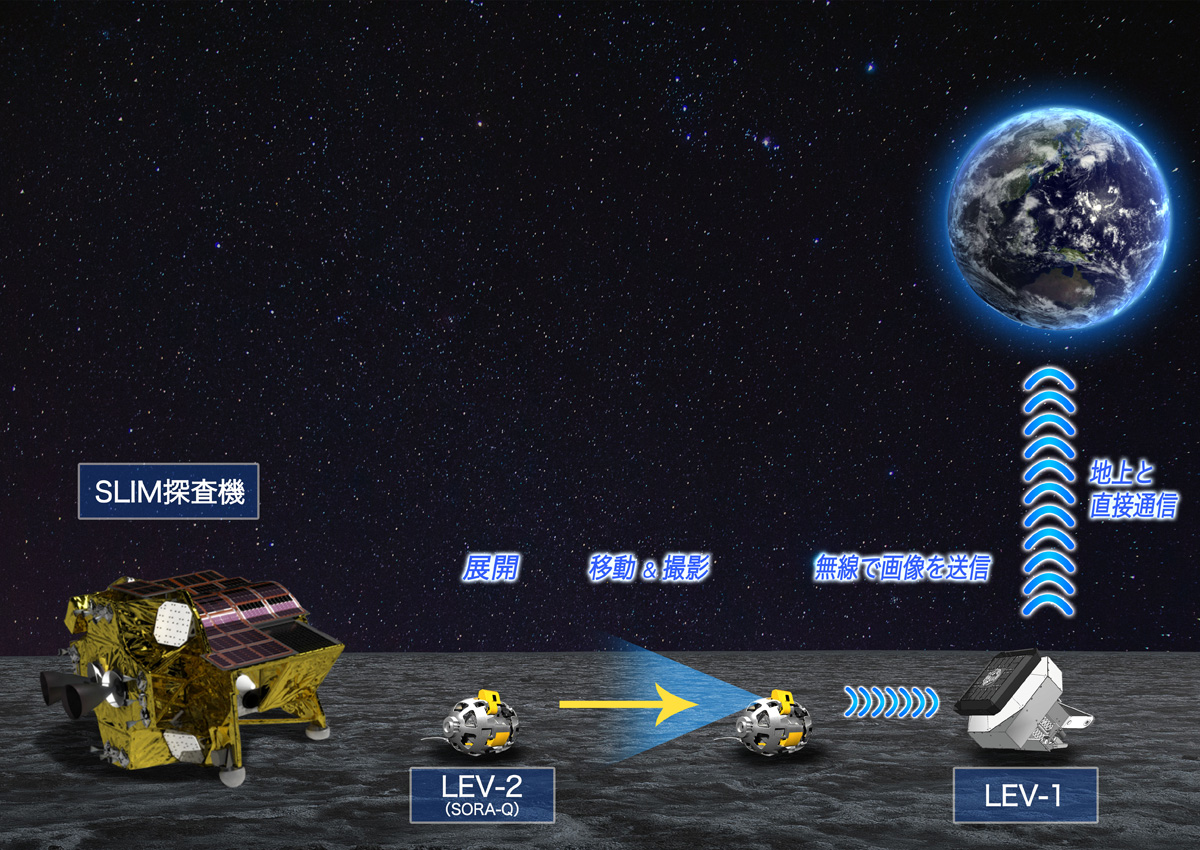

During Japan's SLIM lander mission, SORA-Q traveled 24 metres and operated for over 100 minutes before communications were lost through the LEV-1 relay. According to JAXA's official report, the rover navigated entirely on its own — using onboard image processing to identify the SLIM lander in frame and calculate its own position relative to it. No real-time commands from Earth. Signal delay alone makes that impossible for a robot this small.
The engineering problem: lunar dust
Lunar regolith isn't like sand. It's a fine, abrasive material that destroys moving parts and strips traction from wheels. SORA-Q's engineers solved this with a deliberately offset wheel axis. Instead of rolling flat, the robot bobs slightly as it moves — a motion that lets it push out of loose soil rather than dig into it.



Swarms over single rovers
The bigger argument here is strategic. Losing a single rover worth hundreds of millions of dollars — as NASA experienced with its Mars missions — can kill an entire programme. Send ten small autonomous units, and losing one or two is an acceptable outcome. JAXA's SORA-Q proved this model isn't theoretical anymore.
NASA appears to agree. Its CADRE mission — three suitcase-sized autonomous rovers — is scheduled for a 2026 lunar deployment. But the US is still committing billions to large rovers like VIPER, which was cancelled in 2024 after cost overruns. SORA-Q's 100-minute proof-of-concept, built with toy engineering and a fraction of a traditional rover's budget, makes that comparison pointed.
What comes next
The swarm model scales. A dozen SORA-Q-type robots could map a crater, collect distributed sensor readings, or scout terrain ahead of a crewed landing — all without a single point of failure. Whether NASA, ESA, or commercial players like Axiom Space move in this direction will depend less on the technology, which now clearly works, and more on whether mission planners are willing to rethink what a rover programme looks like.